自從 2015 以來 ROSA 陸續追加功能,另外硬體功能也增加許多,因此在此更新材料清單,以更佳的硬體組合來控制機器人。
通用的電子材料清單如下:
一、主控板 Arduino Nano x 1 含 USB cable x 1
ROSA 作業系統需下載到 Arduino 主控板執行,它比先前的 Uno 體積更小,價格更便宜

USB cable 除了可以從 PC 下載編譯後的韌體到 Arduino 之外,
執行程式時,它從行動電源提供電力給主控板,注意這是使用 USB mini 連接到 Nano。

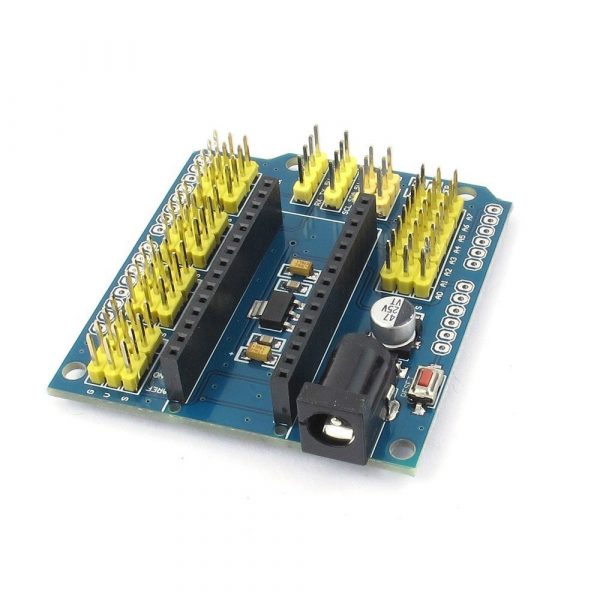
二、Arduino Nano 擴充板 x 1
把主控板插在它上面,然後 SG90 馬達及紅外線遙控器可以直接插接在上面
三、 USB 行動電源 (Output 5V 2.1A) x 1
購買時要注意,至少要有一個 USB 孔可以輸出 5V 2A 供電給 Arduino 主控板,否則開機後電流供給不足,機器人會一直 reset 無法正常執行。另外還有一種狀況,加載之後,5V 電壓降到 4.7V,因為輸出電壓不足會讓機器人的腳縮成一團,這些狀況都需要注意,另外根據之前研究使用 FM9833E 模組性能較佳。

四、舵機 Tower Pro SG90 (六足蜘蛛 x 12,四足蜘蛛 x 8,OTTO like x 4)
這款伺服馬達是目前市場上最便宜最輕巧的,因此有很多廠商製作,我也不會分什麼是正版什麼是膺品,看起來都可以動。正因為如此,馬達的角度控制難以整齊劃一,所以設計機器人採取通電初始時,讓所有馬達預設 90 度角,機器人所有的腳張開站立,以方便玩家組裝機器人,也可按 Arduino 主控板 reset 按鍵或是紅外線遙控器 0 按鈕來設定 90 度。另外遙控器 1 按鈕可用來檢查接在 D4 位置的馬達 30~150度角來回擺動。

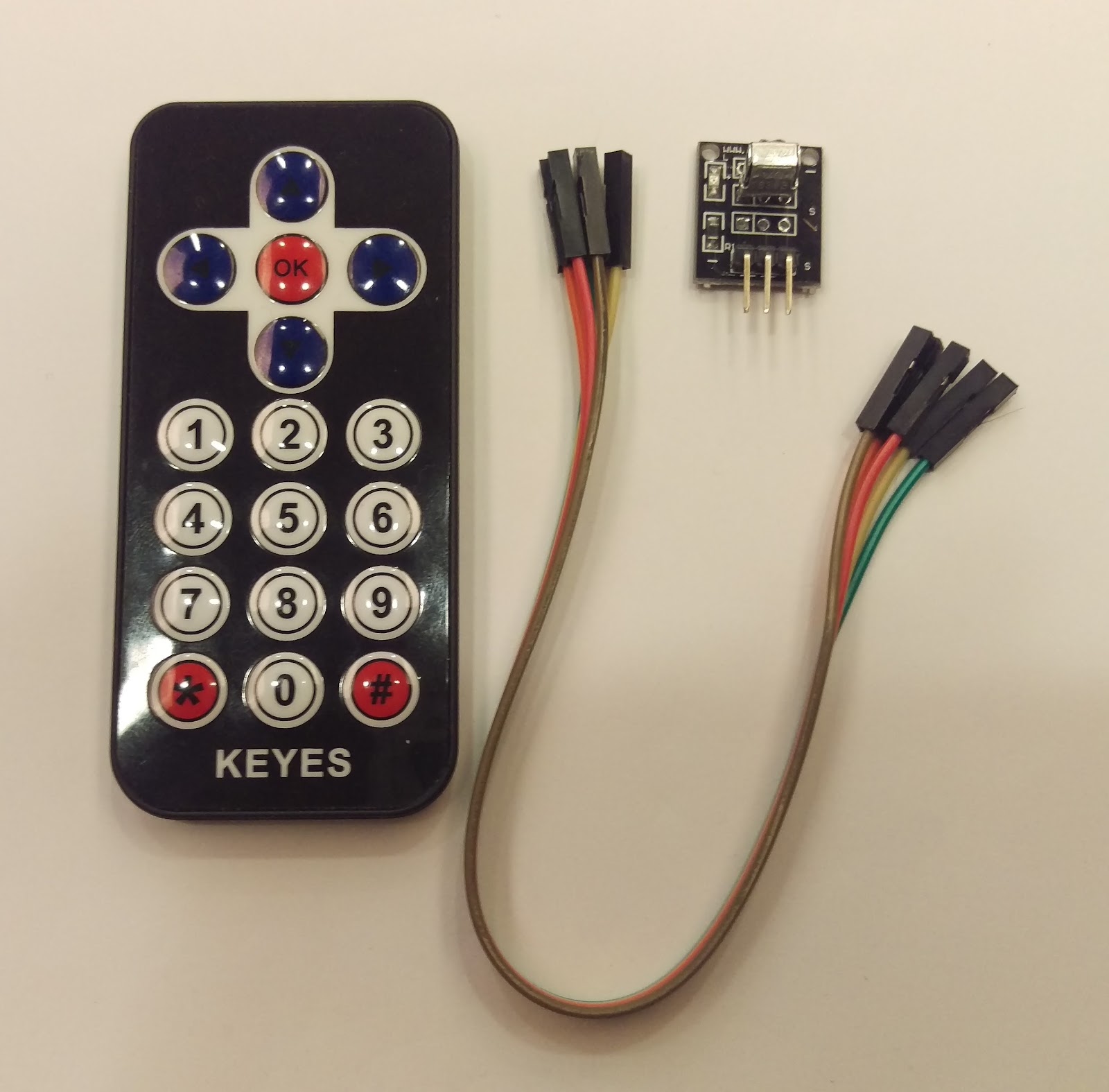
五、紅外線遙控器及接收模組 (含 3 pin 杜邦線) x 1
遙控機器人用,除了 KEYES 遙控器可以用之外,其實大多數的紅外線遙控器都可以用,請參考 http://4rdp.blogspot.tw/2016/03/rosa-30-carmp3.html 說明。
六、HC-06 藍牙模組 (需自備 4 pin 杜邦線) x 1
如果你想手機遙控機器人,那需要加裝藍牙模組, HC-05 也可以用,只是比較貴。

七、PS2 無線模組與搖桿 (需自備 6 pin 杜邦線) x 1
ROSA 已支援 PS2 無線搖桿,很適合機器人格鬥使用,現在實體商店幾乎買不到,但是網購還有賣。

這個感測器除了可以偵測機器人前方是否有障礙物之外,也有裝飾作用,當仿生機器人的眼睛。














沒有留言:
張貼留言