
}{r^{2}}")




三菱棋網頁遊戲
-
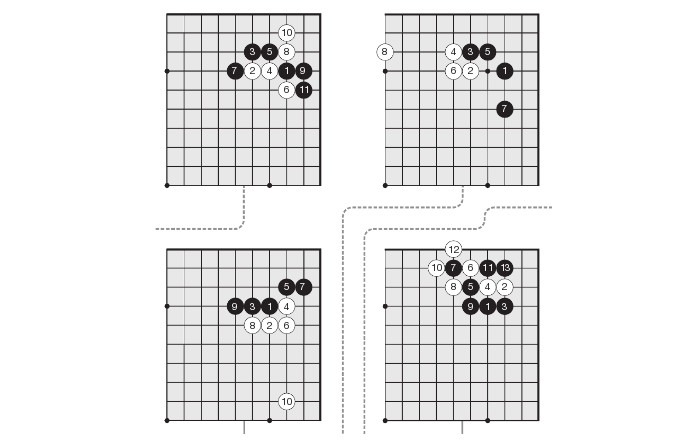
做了一個多月的三菱棋網頁遊戲基本完成,AI棋力很強。 直接玩: trirhombus.html
由於三菱棋的分支較多,因此AI需要比其它我創作的弈棋更多的思考時間。 以後我還是會想辦法提升AI的棋力,以及減少它的思考時間。
在跟AI的對局過程中,我發現後手方的贏面較大,但是否意味著後手方就具有優勢,尚未得證。
6 天前



一階高花開叫,同伴答叫 1NT 後,開叫者再叫發展
1. 再叫原牌組 ─ 六張以上,最高限為好的 15 點,
當 64XX 牌型,若紅心大牌多或一樣強時,先叫紅心
2. 叫出最高階四張牌組 ─ 通常為低限牌,若倒叫須 16 點以上
3. 叫出最低階三張牌組 ─ 不管強弱,被競叫時 PASS
4. 跳叫原牌組 ─ 16 點以上,好的六張以上牌組
5. 加叫 2NT ─ 16-18 點,牌型 5332 或 5422,雙張中有力量,邀請成局
1S --- 1NT ---
2NT --- 3C/D
3H
3S
|
六張牌組,期望開叫者 PASS
8 點以上,五張牌組,迫叫成局
束叫
|
使用時機:
因本制度採二蓋一迫叫系統,所以 6-11 點對五張高花開叫的答叫,通常先以 1NT 迫叫一圈區隔點力,再表示牌情,迫叫無王能讓達叫者表明下列牌情。
若第三四家高花開叫,則不使用迫叫無王,因為答叫者曾 PASS。
發展過程:
1. 當他對開叫者花色有配合時,可以表明支持程度,6-11 點,三張支持
1H/S --- 1NT --- 2# --- 2H/S 3H/S 4H/S | 弱性加一支持,9-10 失墩 弱性加二支持,8 失墩 弱性成局支持,7 失墩 |
感謝蘇明俊紀錄與分享
歷經台北華山 Maker Faire Taipei 2017 擺攤經驗,讓大家對 ROSA 有更多認識與體驗,沒想過我對 ROSA 的介紹可以讓每組經過林益成機甲人形師覓星工坊的遊客駐足在攤前兩三分鐘,雖然我只帶了兩個作品,但是它們充分展示了 ROSA 的精髓,沒有讓我現場漏氣。
回家後經過這些天機器修整與程式除錯,又讓 ROSA 又更進一階:
一、程式三(四)合一,ROSA V18 我已經確認,它可以控制林益成的 OTTO like (紅外線、藍牙、USB),RWG Spider (紅外線、藍牙、USB、PS2 無線搖桿),mBot 小車 (紅外線、藍牙、USB),陳建彰的大甲蟲 (紅外線、藍牙、USB、PS2 無線搖桿)。
二、現在支援 Arduino Nano 板,體積更小,重量也減輕,簡單秤重,RWG Spider 450g,OTTO like 185g。
三、在展場其間,一直用筆電 USB 供電,有個主因是當時 RWG Spider 吃電很兇,若沒有 USB 5V 3A,機器蜘蛛走不了幾步路,在家有時間修整,把有問題的馬達換掉後,USB 5V 2A 行動電源就可以用了,再加上緩起動設計,現在吃電少,並且動起來活靈活現。
四、很多人好奇,為什麼我的機器人活動靈活、跳舞節拍精準以及如何編舞?還有竟然不需要再外加 PWM 板等等問題,因為 ROSA 以分時多工控制 SG90 伺服馬達,也將系統相關時序做了良好的安排,而且連 Arduino 的類比 pin 腳也充分應用於馬達控制。除此之外,關鍵在 ROSA 有內建指令編譯器,可以輕鬆從 USB 下指令控制馬達,這所下的指令可以直 接拷貝到程式碼中,這在編舞控制很方便使用。
五、ROSA 程式碼開源,個人與學校教育免費使用,如有商業應用需求可另談授權,部分程式如下所示,可以選板子、選作品、選搖控器、.....






