請試填寫遊戲結束 (%) 各項數值,讓它們總合為 100%,填寫完後請按計分鈕,可以幫你評分,獲得正分表示你的能源政策選擇比 2016 年台灣的能源政策好。













三菱棋網頁遊戲
-
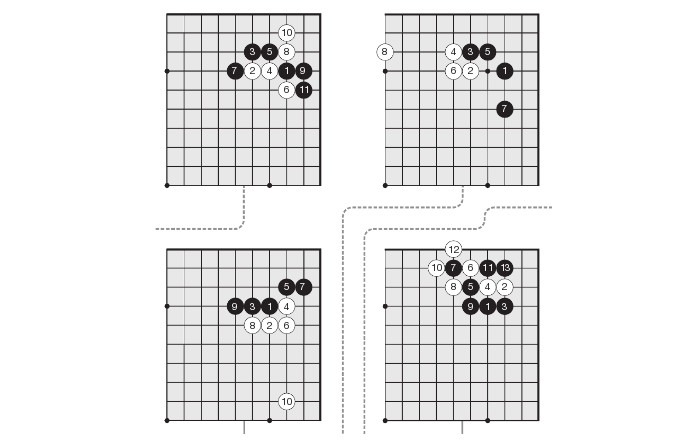
做了一個多月的三菱棋網頁遊戲基本完成,AI棋力很強。 直接玩: trirhombus.html
由於三菱棋的分支較多,因此AI需要比其它我創作的弈棋更多的思考時間。 以後我還是會想辦法提升AI的棋力,以及減少它的思考時間。
在跟AI的對局過程中,我發現後手方的贏面較大,但是否意味著後手方就具有優勢,尚未得證。
6 天前