
一年一度的 Maker Faire @ Taipei 就在今天起於華山 1914 文創園區連續兩天舉行,今天就帶著朝聖的心情前去,可惜芭蕉葉上聽雨聲版主 Pizg 有事不能前來,不然有更多話題當面討論。
這是一個老少咸宜的活動,因為當場在中四 B 親眼看見一位年紀約近八十歲老婆婆在某攤位前認真聽工作人員解說,不過小朋友更多,因為許多父母可能想培養他們成為未來工程師或發明家來看 Maker 如何 DIY 機器人控制。
今天台北市氣溫應該有飆破 35 ℃,不過展場人潮不減,不同的展館有不同的主題,
前些日子台灣大旱,與同學討論水資源回收處理事宜,他的朋友是水資源專家,想要把水加熱以便加入後續的生化處理程序,他的難題是:
假設一個工廠每天有 5000 噸廢水,它需要將水加熱至 80 ℃,請問你需要多大的水池裝水,你會使用何種加熱器或何種方法將水加熱?
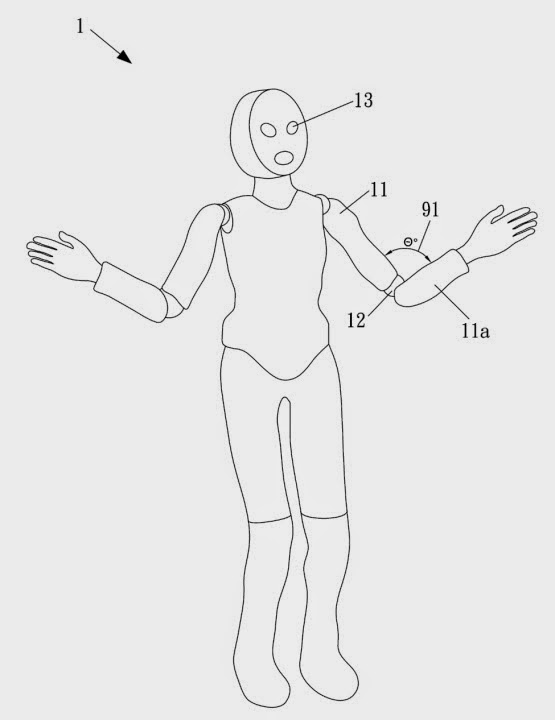 |
| 專利申請書裡的插圖 |
這題與訓練數學感 56 ─ 一道數學題,測試你是「邏輯型」或「直覺型」堪稱姊妹題,不同答案表示數學思維不同,先不公布解答,看看你是哪一型的人。
1=4
2=8
3=24
4=?
 |
| 圖片來源 http://blog.roman-mueller.ch/ |
這是某個私立小學入學考試中的一個問題。回答時間只有5分鐘。4個小朋友站在房間裡,如圖所示。他們只知道下列條件且得遵守以下的規則:

續前文,本文繼續補述其它輸出入指令:
型 態
|
數 值
|
說 明
| |
SERVO
|
伺服馬達
|
0 ~ 255
|
0: 最小角度,180: 最大角度,255: 歸位角度
1 ~ 179: 指定角度,others: 保留原角度
|
PWM
|
脈波寬度調變
|
0 ~ 255
|
脈波寬度 % = 設定值 / 256
|
I2C
|
兩線通訊
|
0 ~ 255
| 功能預留 |
OUTPUT
|
數位輸出
|
0, 1
|
0: low, 1: high
|
INPUT
|
數位輸入
|
0, 1
|
0: low, 1: high
|
ADIN
|
類比輸入
|
0 ~ 1023
|
10 bits 類比輸入
|









