https://4rdp.blogspot.com/2015/04/rosa_4.html
 |
| 圖片引用自維基百科 |
此文作廢,改版內容請見
ROSA 的指令概述 (2015.8.1)
續前文,接下來介紹 ROSA 的指令系統,因為 Arduino 控制器沒有任何鍵盤及螢幕,因此靠通訊的指令來傳達控制的訊息比較適當,所以採用前文所提的原則,使用簡單易懂的明碼文字指令,所有的英文大小寫字母都接受,為了便於說明 ROSA 相關指令語法,後面的說明解釋以大寫字母表示命令,小寫字母為該指令的參數項目,例如,
CONF pin,type1,type2,.....
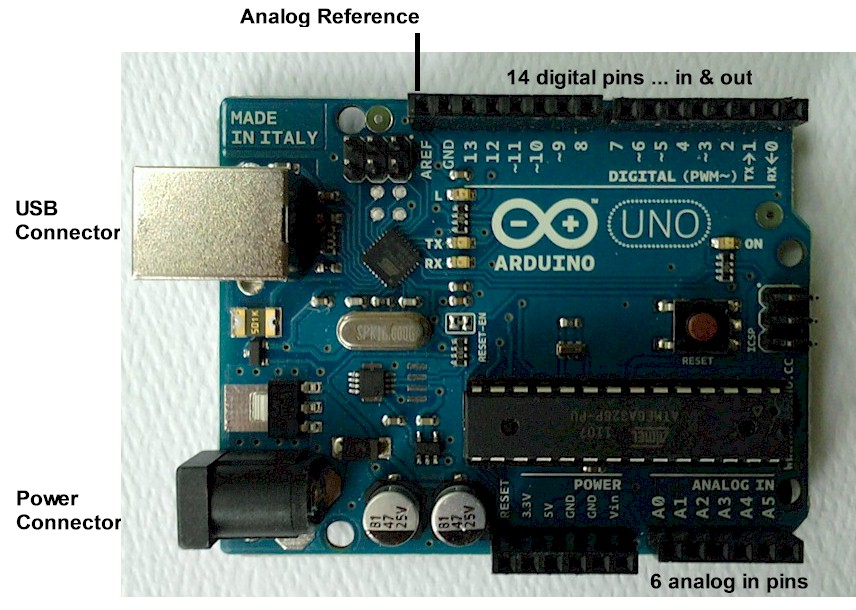
CONF 是 configure 的縮寫,這指令用於設定控制器 pin 腳的用途,ROSA 對控制器 pin 代號定義與 Arduino 是一致的,也是以數字來編號,從號碼 0 開始,以 Uno 為例,上排 0 到 13 是數位的 pin,下排 A0 到 A5 是類比的 pin,ROSA 把編號訂在 200 到 205,也可以用 14 到 19,簡單說類比的腳位排在數位腳之後。(mBot 有 A6、A7)
這指令可以一次設定多隻 pin 腳,只要指定第一腳後,其它就接續設定,最多可連續設定 8 隻 pin 腳。type1 是開頭第一腳的型態,type2 就是相鄰第二腳的型態,type 也是以數字表示,型態定義為